结构健康监测¶
I. SHM 与基础模型¶
1.1 SHM 简介¶
结构健康监测(Structural Health Monitoring, SHM)的目标是在役结构的安全评估、寿命预测和运维优化。通过在结构上布设传感器、长期采集振动和响应数据,并结合模型和算法,对结构状态和潜在损伤进行识别与监测。
1.2 结构动力学基础模型¶
多自由度结构可写成矩阵形式
\[ \mathbf{M}\ddot{\mathbf{x}}(t) + \mathbf{C}\dot{\mathbf{x}}(t) + \mathbf{K}\mathbf{x}(t) = \mathbf{f}(t) \tag{1} \]
符号含义:
- \(\mathbf{x}(t),\dot{\mathbf{x}}(t),\ddot{\mathbf{x}}(t) \in \mathbb{R}^n\):位移、速度、加速度;
- \(\mathbf{M},\mathbf{C},\mathbf{K} \in \mathbb{R}^{n \times n}\):质量矩阵、阻尼矩阵、刚度矩阵;
- \(\mathbf{f}(t) \in \mathbb{R}^n\):外部荷载;
- \(n\):自由度个数。
模态频率、阻尼比和模态振型由上述矩阵表征,是后续系统识别与模态分析的核心量。
1.3 状态空间模型¶
线性定常系统可以写成状态空间形式。在连续时间下,
\[ \dot{\mathbf{x}}(t) = \mathbf{A}_c \mathbf{x}(t) + \mathbf{B}_c \mathbf{u}(t) \tag{2} \]
\[ \mathbf{y}(t) = \mathbf{C}_c \mathbf{x}(t) + \mathbf{D}_c \mathbf{u}(t) \tag{3} \]
连续时间形式 (2)(3) 符号含义:
- \(\mathbf{x}(t) \in \mathbb{R}^n\):状态向量;
- \(\mathbf{u}(t) \in \mathbb{R}^m\):输入向量;
- \(\mathbf{y}(t) \in \mathbb{R}^p\):输出向量;
- \(\mathbf{A}_c,\mathbf{B}_c,\mathbf{C}_c,\mathbf{D}_c\):连续时间状态矩阵、输入矩阵、输出矩阵、直接传递矩阵;
- \(n,m,p\):状态、输入、输出的维数。
离散时间形式(\(k \in \mathbb{Z}\))为
\[ \mathbf{x}[k] = \mathbf{A}_d \mathbf{x}[k-1] + \mathbf{B}_d \mathbf{u}[k] \tag{4} \]
\[ \mathbf{y}[k] = \mathbf{C}_d \mathbf{x}[k] + \mathbf{D}_d \mathbf{u}[k] \tag{5} \]
离散时间形式 (4)(5) 符号含义:
- \(\mathbf{x}[k],\mathbf{u}[k],\mathbf{y}[k]\):第 \(k\) 步的状态、输入、输出;
- \(\mathbf{A}_d,\mathbf{B}_d,\mathbf{C}_d,\mathbf{D}_d\):由连续时间离散化得到的系统矩阵;
- \(k\):离散时间步指标。
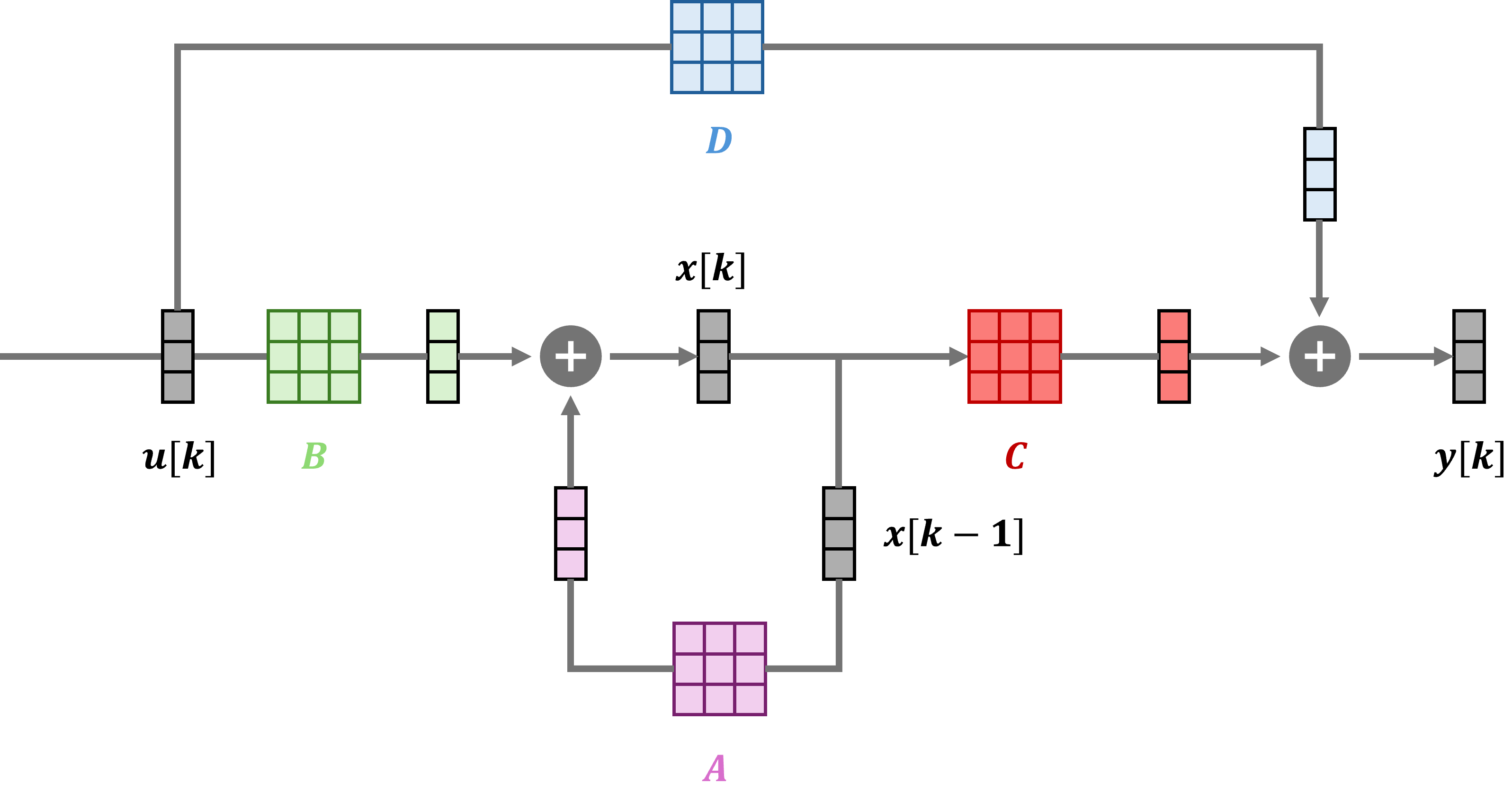
图 1:状态空间模型的方框图表示。
在 SHM 中,常将位移与速度组成结构状态 \(\mathbf{z}(t) = [\mathbf{x}(t)^\top,\dot{\mathbf{x}}(t)^\top]^\top\),在离散时间下使用参数化形式
\[ \mathbf{z}[k] = \mathbf{A}(\theta)\,\mathbf{z}[k-1] + \mathbf{B}(\theta)\,\mathbf{f}[k] \tag{6} \]
\[ \mathbf{y}[k] = \mathbf{H}\mathbf{z}[k] + \mathbf{v}[k] \tag{7} \]
SHM 参数化形式 (6)(7) 符号含义:
- \(\mathbf{z}[k]\):离散时刻的结构状态(位移与速度的堆叠);
- \(\theta = \{\mathbf{M},\mathbf{C},\mathbf{K}\}\):结构参数(质量、阻尼、刚度矩阵);
- \(\mathbf{A}(\theta),\mathbf{B}(\theta)\):由 \(\theta\) 决定的状态矩阵与输入矩阵;
- \(\mathbf{f}[k]\):离散时刻的外部荷载;
- \(\mathbf{H}\):观测矩阵(由传感器类型与布设决定);
- \(\mathbf{v}[k]\):测量噪声。
该紧凑模型是 SHM 中系统与模态识别的基础。
下图给出了该状态空间模型的方框图表示,以及在 SHM 场景下引入参数向量 \(\theta\) 与测量算子 \(\mathbf{H}\) 后的形式:
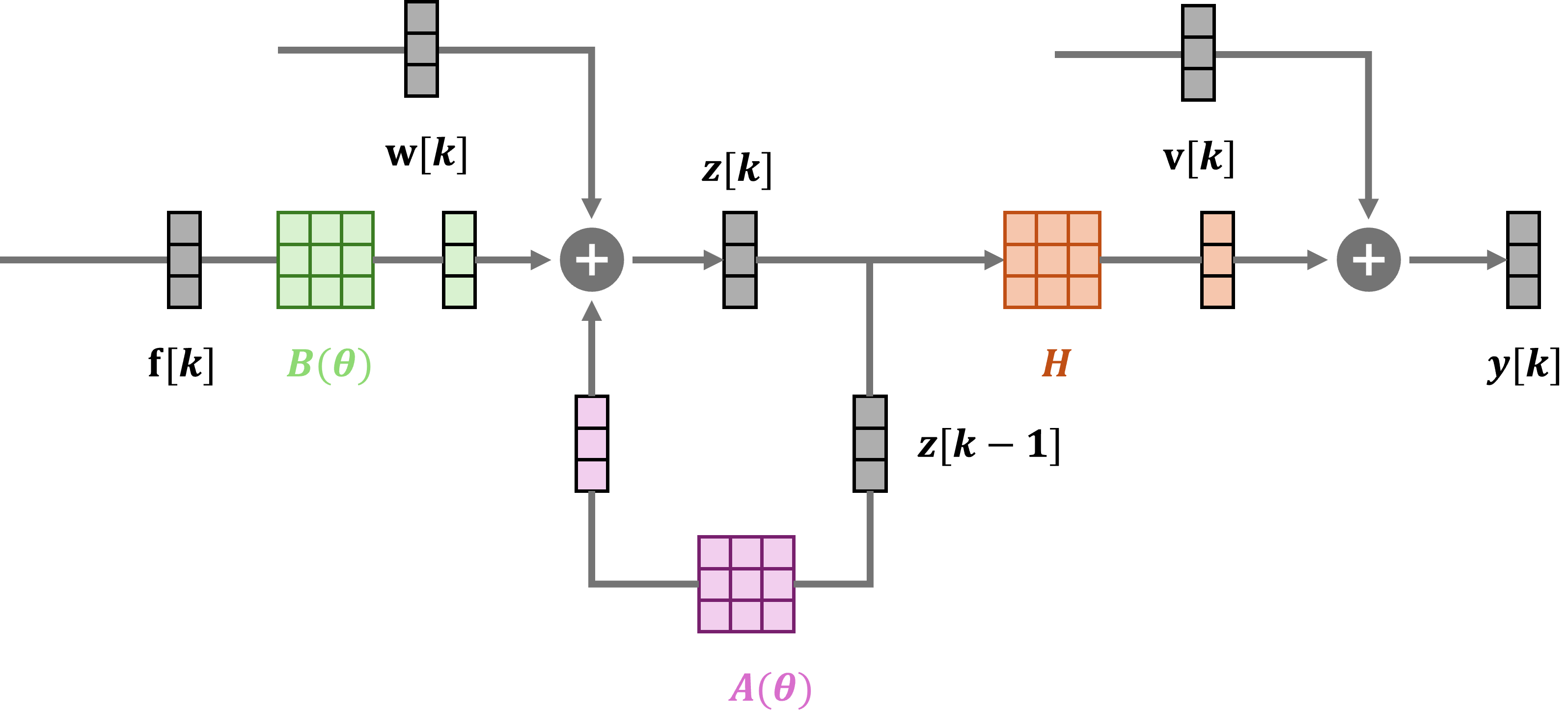
图 2:SHM 场景下带参数与测量算子的状态空间模型。
II. 常用系统/模态识别方法¶
以下为常见、经典且值得重点学习的系统/模态识别方法;每项先简述核心原理,再说明典型适用场景。
2.1 PP¶
- 方法全称:Peak Picking(峰值拾取,PP)。
- 核心原理:在响应功率谱或傅里叶谱上直接读取主峰对应的频率,并由多测点幅值比估计振型。
- 适用场景:模态较稀疏、阻尼较小、信噪比良好的初步估计或快速筛查。
- 边缘计算:适用。优点:仅需 FFT 与寻峰,计算与存储极低,易实时。缺点:精度与稳健性差,易受噪声与密模态影响。
2.2 ARX / ARMAX(PEM)¶
- 方法全称:ARX / ARMAX 与预测误差法(Prediction-Error Methods, PEM)。
- 核心原理:用差分方程(ARX/ARMAX 等)描述输入–输出关系,通过最小化一步 ahead 预测误差估计模型参数,进而可得到模态参数。
- 适用场景:有输入–输出数据且需参数化模型的控制与系统识别;也可在输出仅情形下用 AR/ARMA 类模型。
- 边缘计算:较适用。优点:模型紧凑,数据量可控,低阶时运算量不大。缺点:阶次选取敏感,MLE 迭代可能较重,数值稳定性依赖实现。
2.3 FRF¶
- 方法全称:FRF curve fitting(频响函数拟合,FRF);常用实现如有理分式多项式(RFP)等。
- 核心原理:在频域用有理函数(或正交多项式)拟合实测 FRF,通过极点/留数提取模态频率、阻尼比与振型。
- 适用场景:有已知激励的实验室模态试验(锤击、激振器),需要较精确的模态参数时。
- 边缘计算:一般。优点:频域拟合可限制在感兴趣频段,降阶拟合可减算力。缺点:需已知激励与 FRF 估计,有理拟合与求根对资源有要求,多通道全频段较吃资源。
2.4 Transfer function fitting(传递函数拟合)¶
- 方法全称:Transfer function fitting(传递函数拟合,TF fitting)。
- 核心原理:用有理传递函数(如 \(H(s)=N(s)/D(s)\) 或频域多项式比)拟合实测 FRF 或输入–输出频域数据,从拟合模型的极点与留数提取模态频率、阻尼比与振型。
- 适用场景:已有 FRF 或频域数据(如锤击/激振器试验后);作为 FRF 估计的后续步骤得到参数化模态模型,常用于经典模态分析。
- 边缘计算:一般。优点:可限定频段、降阶拟合以减算力。缺点:需 FRF 或频域数据;有理拟合与求根多需迭代或非线性优化,多通道全频段较吃资源。
2.5 FDD / EFDD¶
- 方法全称:Frequency Domain Decomposition / Enhanced FDD。
- 核心原理:对输出功率谱密度矩阵做奇异值分解,用主奇异向量近似振型,主奇异值曲线峰值对应频率;EFDD 在频域单模态段拟合以改进阻尼估计。
- 适用场景:仅测响应、不测激励的运行模态分析(如环境激励下的桥梁、楼宇)。
- 边缘计算:较适用。优点:输出仅即可,按频线 SVD 可分批处理;通道与频线不多时算力可接受。缺点:需缓存做 PSD;EFDD 阻尼拟合增加一步计算。
2.6 随机减量法(RDT / RDM)¶
- 方法全称:Random Decrement Technique / Random Decrement Method(随机减量法,RDT / RDM)。
- 核心原理:在环境激励下的长时程输出响应中,按触发条件(如阈值/零交叉)截取大量短片段并求平均,使随机激励项相互抵消,从而得到近似的 自由衰减特征响应(等效脉冲响应);据此可估计模态频率与阻尼(多通道时也可得到振型)。
- 适用场景:仅输出运行模态分析中,希望从环境数据中获得更"干净"的自由衰减信号;常作为 NExT/ERA 的预处理步骤,或用于阻尼的简化估计。
- 边缘计算:较适用。优点:主要是缓存 + 触发 + 叠加平均,无重优化。缺点:需要足够数据做平均;触发阈值与条件会影响质量;多通道会增加内存与带宽压力。
2.7 ERA / NExT-ERA¶
- 方法全称:Eigensystem Realization Algorithm / Natural Excitation Technique – ERA(特征系统实现算法 / NExT-ERA)。
- 核心原理:ERA 由脉冲响应或自由衰减构造 Markov 参数与 Hankel 矩阵,经 SVD 与最小实现得到状态空间并提取模态;NExT-ERA 在环境激励下用输出的自/互相关构造等效脉冲响应,再对之应用 ERA。
- 适用场景:ERA 适用于有脉冲或自由衰减的试验;NExT-ERA 适用于仅测响应、不测激励的运行模态分析(如桥梁、楼宇等大型结构)。
- 边缘计算:较适用。优点:输出仅,Hankel 规模可限;单次 SVD 为主,无迭代。缺点:相关估计需缓存;阶次选取与多阶试算会增计算量。
2.8 SSI¶
- 方法全称:Stochastic Subspace Identification(SSI:SSI-COV / SSI-DATA)。
- 核心原理:从输出(或输入–输出)的 Hankel/Toeplitz 块矩阵构造投影,用 SVD 得到可观/可控子空间,再恢复离散状态空间矩阵并从中提取模态。
- 适用场景:输出仅或输入–输出均可;长数据、多测点下稳健的模态识别,工程 OMA 中应用广泛。
- 边缘计算:不太适用。优点:识别效果最佳、工程常用。缺点:大 Hankel、大 SVD,多阶次稳定图试算,计算与内存需求高,低功耗边缘设备压力大;可做降维或云端协同以减轻边缘负担。
2.9 BAYOMA¶
- 方法全称:Bayesian Operational Modal Analysis(贝叶斯运行模态分析,BAYOMA)。
- 核心原理:在输出仅情形下,将模态参数视为随机变量,用贝叶斯推断(如 MCMC、变分或 Laplace 近似)从响应数据估计其后验分布,得到模态参数估计及不确定性(置信区间等)。
- 适用场景:输出仅 OMA,且需要模态参数的不确定性量化或置信区间时;可与 SSI、FDD 等点估计方法互补。
- 边缘计算:不太适用。优点:提供后验与不确定性,利于风险评估与决策。缺点:贝叶斯计算(MCMC 等)重,算力与内存需求高,通常适合离线或云端。
III. 损伤评估方法¶
以下按「先判定、再定位、再量化」的顺序罗列常见损伤评估方法;每项标明所解决的维度(判定 / 定位 / 量化)。
3.1 模态参数变化与基线比较¶
- 核心思路:将当前识别得到的模态频率、阻尼比或振型与健康基线比较,构造标量或向量指标(如频率漂移、阻尼变化),再通过阈值或简单统计检验判断是否异常。
- 适用场景:已有健康基线、需快速判断是否存在损伤或明显变化时。
- 解决维度:判定;可辅助粗略量化(如“变化幅度”)。
- 边缘计算:适用。优点:仅比较与阈值,计算与存储极低。缺点:依赖基线质量,简单指标可能漏检。
- 在线/离线:适合在线计算(实时比较即可)。
3.2 基于响应/特征的异常检测¶
- 核心思路:不显式用模态参数,而是用多通道响应的统计特征(如 PCA 残差、协方差变化、马氏距离)或 novelty 指标,与基线分布比较,超出阈值即判为异常。
- 适用场景:测点较多、希望数据驱动、不依赖精确模态识别时。
- 解决维度:判定。
- 边缘计算:较适用。优点:基线/模型可离线训练,在线只做投影与阈值比较。缺点:多通道时协方差或 PCA 有计算量。
- 在线/离线:基线离线、检测可在线;或全离线。
3.3 MAC 与振型类指标¶
- 核心思路:用模态置信度(MAC)、振型差、振型斜率等度量当前振型与基线的差异;空间上差异大的区域或参与度变化的模态可提示损伤位置。
- 适用场景:已有多阶振型估计、需从振型变化判断损伤并大致定位时。
- 解决维度:判定、定位。
- 边缘计算:较适用。优点:MAC 等为内积与范数,计算轻。缺点:需当前振型,若在线则依赖在线模态识别。
- 在线/离线:可在线(若模态在线估计)或离线。
3.4 柔度/刚度矩阵法¶
- 核心思路:柔度与刚度在缩减自由度上互为逆;由识别出的模态参数(频率、振型及质量近似)可构造柔度矩阵,或求逆得刚度矩阵。损伤导致刚度降、柔度增,比较当前与基线柔度或刚度(或其变化向量),变化显著的位置即可能损伤区域,并可辅助量化刚度折减。
- 适用场景:已知多阶模态且可近似质量分布时;对梁、框架等结构常用;表达形式可选柔度或刚度,本质同一。
- 解决维度:判定、定位;可辅助量化。
- 边缘计算:一般。优点:物理意义清晰,矩阵规模不大时可行。缺点:需多阶模态与质量近似,矩阵运算或求逆。
- 在线/离线:多用于离线;轻量化后可在线。
3.5 曲率与应变模态¶
- 核心思路:由位移振型求曲率(或应变模态);损伤处刚度局部下降,曲率或应变在该处出现突变或异常峰值,据此定位损伤。
- 适用场景:测点较密、梁或板类结构、需局部定位时。
- 解决维度:定位。
- 边缘计算:较适用。优点:曲率由振型差分或拟合,计算量不大,易分布式。缺点:需较密测点与振型估计。
- 在线/离线:可在线(若振型在线)或离线。
3.6 模型更新与刚度反演¶
- 核心思路:建立参数化有限元或简化模型(如单元刚度折减系数),以当前测试数据(模态、响应等)为约束,通过优化或贝叶斯反演估计刚度折减等参数,得到损伤位置与程度。
- 适用场景:有可靠结构模型、需定量评估损伤位置与严重程度时。
- 解决维度:判定、定位、量化。
- 边缘计算:不太适用。优点:可定量。缺点:优化/反演迭代重,计算与内存需求高。
- 在线/离线:适合离线计算;在线通常需云端或强算力节点。
IV. 实验模态分析教学视频¶
Amirali Najafi 系列
NPTEL IIT Delhi 系列
V. 相关链接¶
-
常用环境激励模态识别方法
知乎